機械工学系
2022年12月2日
機械工学専攻の大学院生がInternational Conference on Materials & Processing 2022で研究発表しました
2022年11月6日~10日、沖縄(那覇)で開催された「The Japan Society of Mechanical Engineers ICM&P 2022 International Conference on Materials & Processing 2022」で、機械工学専攻 博士前期課程2年 菅井 美 柚さん(小山研究室)が以下の研究発表をしました。
・タイトル
「The Fracture Mechanism of 2DP‐GFRP with Absorption and Desorption of Moisture」
・研究内容
本研究は、不燃性構造材料としてのGFRPに対する難燃剤において、従来の単粒子径に比べて、成形性、難燃特性を 向上させることが可能な二粒子粒子の適用による新規複合材料の創製を行っている。その中で実用化を考慮した水 分含有時の破壊メカニズムの定性的な解明および破壊とAE計測データの相関性を用いた定量的な評価の検討につい ての成果を発表した。
関連資料 International Conference on Materials & Processing 2022プログラム
https://jsmempd.com/conference/icmpconf/2022/wp-content/uploads/2022/10/ICMandP2022_FinalProgram.pdf

2022年11月4日
電気工学専攻、電気電子工学系の学生が電気学会の合同研究会で研究成果を発表しました
電気工学専攻博士前期課程2年生の菊池孝志さん、電気電子工学系4年生の小池俊輝さん(いずれも石田隆張研究室)が2022年11月2日にハイブリッド形式で実施された 「電気学会システム/スマートファシリティ合同研究会」にて対面形式にて研究発表を行いました。発表題目は以下となります。
菊池孝志:「ピエゾ素子を用いた学習型圧電タッチパネルの試作」
小池俊輝:「簡易モデルを用いた水トリーの進行と損失電流波形の評価」
また、電気電子工学系 石田隆張 教授も同研究会にて対面形式で下記の研究発表を行いました。
「EV充電ログデータを用いた電池総容量推定の一考察」
参考URL https://workshop.iee.or.jp/sbtk/cgi-bin/sbtk-showprogram.cgi?workshopid=SBW00007F63
なお、本研究会は電気学会の電子・情報・システム部門と産業応用部門という2つの異なる技術部門がコラボレーションをして実施している技術横断研究会となります。
2022年9月30日
物理学専攻および物理学系の学生が「2022年 第83回 応用物理学会秋季学術講演会で研究発表をしました
2022年9月20日(火)〜9月23日(金)に東北大学で開催された「2022年 第83回 応用物理学会秋季学術講演会」で、物理学専攻修士2年生今村颯さん、物理学系 4年生増田諒介さん、物理学系2021年度卒業生福田晴菜さんがそれぞれポスター セッションにて研究発表を行いました。
この学術講演会は応用物理学会が年に2回開催しているもので、講演総数4,000 件に及ぶ応用物理分野では国内最大の会議です。講演会はハイブリッド開催で あったものの、ポスター発表はすべて対面で行われ、全国から多くの研究者が集まりました。私たちの発表は、終始質問者が訪れる盛況で、発表した学生の自信 につながったと考えます。
研究発表タイトル:
今村颯 「脂質二分子膜内部に閉じ込められた単一高分子鎖のAFM観察」
増田諒介「自己推進運動イオンゲル多体系の統計分布」
福田晴菜「新規自己推進型イオンゲルの探索」
2022年9月30日
機械工学専攻の大学院生が日本機械学会D&D Conference2020で研究発表しました
2022年9月5日(月)~8日(木)、秋田県立大学で開催された「日本機械学会D&D Conference 2022」(一般社団法人 日本機械学会主催)で、機械工学専攻の大学院生3名が研究発表しました。 ・CFRP 製アンチローリング装置の提案 発表者:平山 翔大(博士前期課程2年 宮本研究室) ・模型空気ばねを用いた台車の曲線通過時の輪重横圧測定 発表者:中丸 隆太 (博士前期課程2年 宮本研究室) ・鉄道貨車の低床化を目的とした縮尺模型用CFRPばねの性能評価 発表者:草間 悠允(博士前期課程2年 宮本研究室)
関連資料 日本機械学会D&D Conference 2022プログラム
2022年9月16日
電気工学専攻の学生が「2022年 電気学会 電子・情報・システム部門大会」で研究発表をしました
2022年8月31日(水)〜9月2日(金)に広島大学で開催された「2022年 電気学会 電子・情報・システム部門大会」で,電気工学専攻修士2年生菊池孝志さんがポスターセッションにて研究発表を行いました。
この大会は電気学会の電子・情報・システム部門における若手研究発表の場で,各自が取り組んできた研究内容を,多くの参加者から直接質疑討論を受けることで,各自の研究を発展させる場となっています。
研究発表タイトル:「圧電素子を用いた学習型圧電タッチパネルの開発」
発表内容:建設現場等での過酷な操作状況における耐久性を持ったタッチパネルの開発に取り組んでいます。この目的のために,現在スマートフォン等に使用されている静電タッチパネルとは異なる,圧電素子を使った圧電タッチパネルの開発を行っています。本報告では操作時における安定性の向上を目的として,ユーザー毎の異なる操作方法を考慮した,学習型圧電タッチパネルの開発経過について報告しました。
2022年5月27日
機械工学専攻の大学院生が日本設計工学会2022年度春季大会で研究発表しました
2022年5月21日(土)、22日(日)、ZOOMにて開催された「日本設計工学会 2022年度春季大会研究発表講演会」(公益社団法人 日本設計工学会主催)で、機械工学専攻の大学院生5名が研究発表しました。
・円筒構造体の圧潰特性(第2報,衝撃エネルギー吸収への変形速度と折線の影響)
発表者:橋爪 崇弘(博士前期課程2年 寺田研究室)
・模擬積雪を通過する車輪の走行抵抗力測定
発表者:井野 裕斗 (博士前期課程1年 宮本研究室)
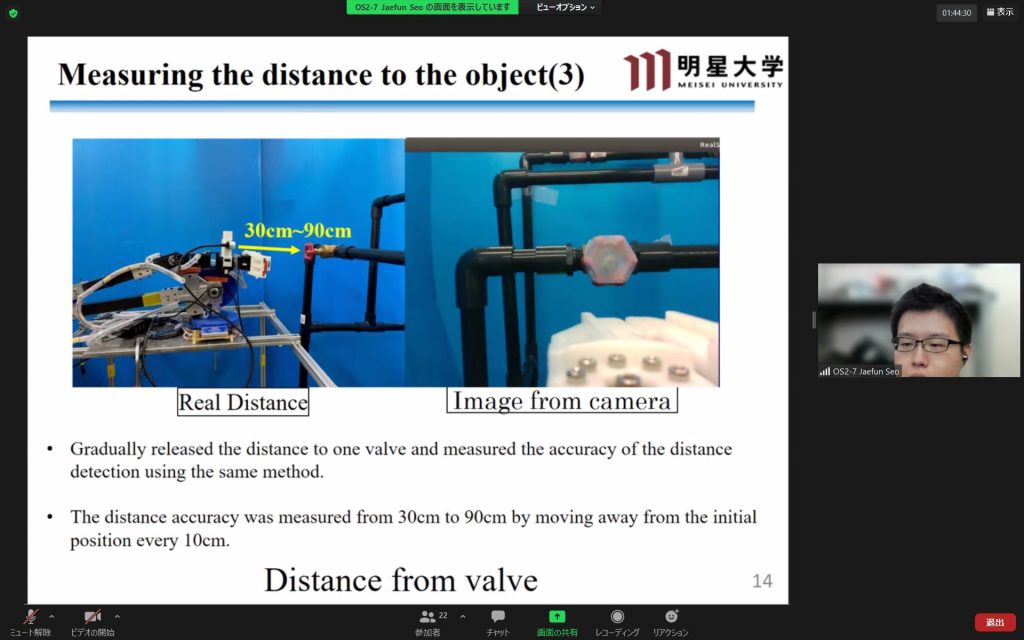
・レスキューロボットアーム搭載用の深度カメラによるバルブの認識と距離測定の基礎検討
発表者:徐 齊焄(博士前期課程2年 山崎研究室)
・VaRTM法によるCFRPハニカムコア作製の流動解析における解析パラメータの検討
発表者:須崎 亮太(博士前期課程2年 小山研究室)
・CFRP製フライホイール成形における樹脂流動が繊維配向に与える影響の解析的検討
発表者:佐野 寛(博士前期課程2年 小山研究室)
関連資料
日本設計工学会2022年度春季大会研究発表講演会プログラム
https://www.jsde.or.jp/japanese/conference/springsymposium2022_program_table_rev.pdf
2022年3月22日
電気工学専攻の大学院生が電気学会全国大会で研究成果を発表しました
電気工学専攻 博士前期課程2年の八亀 雅弘さん (石田 隆張研究室)が2022年3月22日(火)にオンライン形式で実施された「令和4年電気学会全国大会」にて「再エネ増設に伴う直流連系増設効果のY法による検証」と題して研究成果を発表しました。
また、3月21日(月)に電気電子工学系 石田 隆張教授も同大会にて「COVID-19に伴う緊急事態宣言と電力需要量の傾向」と題した研究発表を行い、さらに同日、系統機器・制御(蓄電池II)のセッションで座長を担当しました。
- 発表タイトル:再エネ増設に伴う直流連系増設効果のY法による検証
- 発表者:八亀 雅弘、石田 隆張
- 発表内容 : 政府のカーボンニュートラル宣言による再生可能エネルギーの増設に伴い、洋上風力等の再生可能エネルギー由来の電力を電源地域から電力の大消費地に直流連系で送電する技術が課題となっている。従来の議論では一定量の電力を直接、電力の大消費地に直流連系で送電することが主眼となっていて、電源地域での技術対策に関する分析が少ない状況にある。そこで本報告では再生可能エネルギーの増強が電源地域に与える影響について、電中研Y法を用いた解析結果について報告した。
2022年3月18日
機械工学専攻の大学院生が第13回日本複合材料会議(JCCM13)で研究発表しました
2022年3月7日(月)~9日(水)、ZOOMにて開催された「第13回日本複合材料会議(JCCM13)」(公益社団法人 日本材料学会、社団法人 日本複合材料学会主催)で、機械工学専攻の大学院生4名が研究発表しました。
- 発表タイトル:脱オートクレーブ成形法によるCFRPハニカムコアの試作及び機械特性評価
- 発表者:大野 真理菜(博士前期課程2年 小山 昌志研究室)
- 発表タイトル:二粒子径粒子が不燃性GFRPの破壊メカニズムヘ及ぼす影響
- 発表者:菅井 美柚(博士前期課程1年 小山 昌志研究室)
- 発表タイトル:非線形ばね特性を有するCFRP製省スペースばねの開発
- 発表者:草間 悠允(博士前期課程1年 宮本 岳史研究室)
- 発表タイトル:実験用 CFRP製トーションバーの設計パラメータの分析
- 発表者:平山 翔大(博士前期課程1年 宮本岳史研究室)
関連資料
2022年3月18日
機械工学専攻の大学院生が日本機械学会 第28回関東支部総会・講演会で研究発表しました
2022年3月14日(月)~15日(火)、工学院大学を主催校としてオンライン開催された日本機械学会第28回関東支部総会・講演会にて、機械工学専攻 博士前期課程2年生 富塚 裕貴さん(齊藤 剛研究室)が講演発表しました。第28回目の開催となるこの会議は、関東一円の大学・研究機関・企業の研究者が集まり、機械工学の分野ついて幅広く議論する会議です。
研究発表について
- タイトル:LIPS による燃料濃度・温度計測のための発光スペクトルシミュレーション
- 著者:富塚 裕貴、齊藤 剛、Jeonghoon LEE(東京大学大学院)、Laurent ZIMMER(CentraleSupelec Université)
研究内容
レーザー誘起プラズマ分光法(LIPS:Laser-Induced Plasma Spectroscopy)では、光学フィルターを用いて特定の波長域の光を取り出し、透過した光を高速度カメラで撮影することにより二次元的な原子・分子の分布を計測することが可能となります。また,複数の原子・分子の発光強度を比較することで燃料濃度や燃焼濃度の分布について解析することが可能です。そのためには正確な発光スペクトルのシミュレーションを行う必要があります。
そこで本研究では各温度、当量比ごとのCH4-airおよびH2-air燃料を燃焼させた際のH、O、N原子及びCN、 C2分子の発光スペクトルについてシミュレーションを行い、各原子分子の発光強度を比較することでLIPS計測法の可能性について議論しました。
2022年2月7日
機械工学専攻の大学院生が国際シンポジウムAROB2022で研究発表しました
2022年1月25日(火)~27日(木)オンライン開催された7th International Symposium on Artificial Life and Robotics(AROB 27th 2022)にて、機械工学専攻 博士前期課程1年生 徐 齊焄さん(山崎 芳昭研究室)が、査読採択された講演論文を口頭発表しました。27回目の開催となるこの国際会議は、コンピュータをベースにした人工生命やロボット工学に関する新技術の開発について、独自の研究を発表し、議論するための国際会議です。(基調講演11件、口頭発表384件、参加者539名、11ヶ国)
研究発表について
・タイトル
「Object recognition by RealSenseD435 using ROS and object holding with 6 DoF manipulator」
(ROSを使用したRealSenseD435によるオブジェクト認識と6自由度マニピュレータによるオブジェクト保持)
・発表者
Jaefun Seo, and Yoshiaki Yamazaki
・研究内容
災害救援ロボットは、被災地で瓦礫に埋もれた犠牲者を探すために、手元にカメラを備えたマニピュレーターを装備し、対象物との距離情報を把握することが重要です。そこで、6自由度マニピュレーターに深度カメラIntel RealSenseD435を接続し、制御にROS(Robot Operating System)、バルブ認識のツールとして処理速度と精度が高いSingle Shot multibox DitectorとTensorFlowを使用しました。本研究では、深度カメラから取得した距離情報をマニピュレーターの制御系に送信するために、ワンクリックでバルブを自動的に認識して回転させる方法を提案しました。 実験の結果、バルブの形状が複雑なため、取得した距離情報に大きな誤差が生じるケースを明らかにしました。 また、RGBカメラと深度カメラの位置の違いによる投影されたカメラ画像と深度画像の位置ずれ、取得した座標や距離情報に生じる誤差について評価したものです。